
A Robotika Átfogó Szószedete: Alapfogalmaktól a Mesterséges Intelligenciáig: Fontosnak tartom az edukációt és az érzékenyítést az AI-val és robotikával kapcsolatos területeken, többek között ezért is szeretek oktatni. Ennek egy jeleként itt a robot Gy.I.K, azaz a robotika mögötti alapfogalmak, hogy egy ötödikes is megértse. Tehát, mi is az a… robotika, első körben?
A robotika egy rendkívül összetett és interdiszciplináris terület, amely a gépészet, az elektronika, a számítástechnika és a mesterséges intelligencia legjavát ötvözi. Célja olyan gépek tervezése, építése és üzemeltetése, amelyek képesek autonóm módon feladatokat végrehajtani a fizikai világban. A terület gyors fejlődése miatt elengedhetetlen egy közös szókincs, amely segít eligazodni a technológiai koncepciók, hardveres komponensek és szoftveres megoldások útvesztőjében.
Ez a szószedet azért jött létre, hogy egyértelmű és közérthető magyarázatot nyújtson a robotika legfontosabb fogalmairól, a legalapvetőbb definícióktól a legmodernebb trendekig. A szótár logikusan felépített kategóriákba rendezi a kifejezéseket, hogy az olvasó ne csak egy-egy szó jelentését ismerje meg, hanem a teljes rendszer összefüggéseit is átlássa. A bejegyzések a magyar (angol): magyarázat magyarul formátumot követik, hogy a nemzetközi szakirodalomban való tájékozódást is megkönnyítsék. Színesítés képpen néhány helyen illusztrációkat is beszúrtam, hogy ne legyen olyan tömény a tartalom.
Mielőtt belevágnánk a technikai részletekbe, érdemes megemlíteni a robotika kulturális és etikai alapjait is. Isaac Asimov tudományos-fantasztikus író három törvénye – bár fiktívek – mélyen beágyazódtak a robotikáról való gondolkodásba, és párbeszédet indítottak az ember és gép közötti biztonságos és etikus együttélésről. Ezek a törvények emlékeztetnek arra, hogy a technológiai fejlődés végső soron mindig az emberiséget kell, hogy szolgálja.
Fontos megjegyzés a magyar terminológiával kapcsolatban: míg számos fogalomnak van bevett magyar megfelelője, mint például a hasznos teher (payload) vagy a szabadságfok (degrees of freedom) , addig a legújabb, angol nyelvterületen született koncepciókat (pl. Digital Twin, Physical AI) a magyar szakmai és tudományos közeg is gyakran eredeti formájukban használja. Szószedetünk ezt a gyakorlatot tükrözi, segítve a naprakész tudás elsajátítását.
Alapvető robotikai fogalmak
Mielőtt a robotok konkrét típusait vagy alkatrészeit vizsgálnánk, elengedhetetlen megismerkedni azokkal az alapvető fogalmakkal, amelyek a robotika tudományának gerincét alkotják. Ezek a definíciók adják meg azt az elméleti keretet, amelyben a robotok működését értelmezzük és elemezzük. Meghatározzák, hogy mit is nevezünk robotnak, hogyan írjuk le a mozgásukat matematikailag, és hogyan viszonyulnak az őket irányító emberekhez. Ezen alapelvek megértése kulcsfontosságú a bonyolultabb témák befogadásához.
Az automata (automaton) és a modern robot (robot) közötti különbségtétel például rávilágít a technológia fejlődésének legfontosabb lépcsőfokára: a fix, mechanikus ismétlődésről a programozható, rugalmas viselkedésre való áttérésre. Míg az automata egyetlen, előre meghatározott feladatot hajt végre újra és újra, addig a robotot szoftver vezérli, ami lehetővé teszi, hogy fizikai átalakítás nélkül is képes legyen különböző feladatok ellátására. Ez a váltás a mechanikus funkcionalitásról a programozható logikára helyezte a hangsúlyt, és ez a rugalmasság a modern robotika alapköve. Ez vezet tulajdonképpen oda is, hogy beégetett fix programkódok helyett már mesterséges intelligenciával vezérelt, bármilyen környezethez alkalmazkodó kognitív robotokat (cognitive robot) is fejelsztünk, alkalmazunk.
- Robotika (Robotics): A mérnöki tudományok és a tudomány egy multidiszciplináris területe, amely a robotok tervezésére, építésére, üzemeltetésére és használatára, valamint az irányításukhoz, szenzoros visszacsatolásukhoz és információfeldolgozásukhoz szükséges számítógépes rendszerekre összpontosít. Ötvözi a gépészetet, az elektrotechnikát, a számítástechnikát (programozást) és manapság már a mesterséges intelligenciát.
- Robot (Robot): Programozható gép, amely képes összetett cselekvéssorozatok automatikus végrehajtására. A robot szenzorok és aktuátorok segítségével lép kölcsönhatásba a fizikai világgal egy feladat elvégzése érdekében, gyakran bizonyos fokú autonómiával. Az egyszerűbb gépektől a programozhatósága és/vagy akár a szenzoros visszacsatolás alapján történő cselekvés-adaptációs képessége különbözteti meg (ez már eggyel fejletteb, mint mindjuk egy sima gyári robotkar).
- Automata (Automaton): Korai önműködő gép, amelyet arra terveztek, hogy automatikusan kövessen egy előre meghatározott műveletsorozatot vagy reagáljon előre beállított utasításokra. A modern robottal ellentétben az automata általában nem programozható át más feladatokra, és nem képes a viselkedését a környezeti visszajelzések alapján módosítani, hanem ugyanazokat a cselekvéseket ismétli.
- Bionika (Bionics): A természetben található biológiai rendszerek, módszerek és folyamatok tanulmányozása és alkalmazása a modern mérnöki rendszerek és technológiák, beleértve a robotok tervezésében és fejlesztésében. Ez a terület az élő organizmusokból merít ihletet hatékonyabb és képességesebb gépek létrehozásához, például rovarok mozgása alapján tervezett lábakkal mozgó robotok esetében.
- Kinematika (Kinematics): Pontok, testek és testrendszerek mozgásának tanulmányozása anélkül, hogy figyelembe vennénk a mozgást okozó erőket. A robotikában a kinematika a geometriát alkalmazza a kinematikai láncok (a robot tagokból és csuklókból álló szerkezete) mozgásának tanulmányozására/kiszámítására, hogy összekapcsolja a csuklóparamétereket a végmegfogó vagy a robot bármely más részének térbeli helyzetével és orientációjával. A kinematika egyenletei teszik lehetővé, hogy egy „fogd meg a tárgyat az X,Y,Z koordinátán” parancsot a vezérlő lefordítson a robot ízületeinek szükséges szögelfordulásaira.
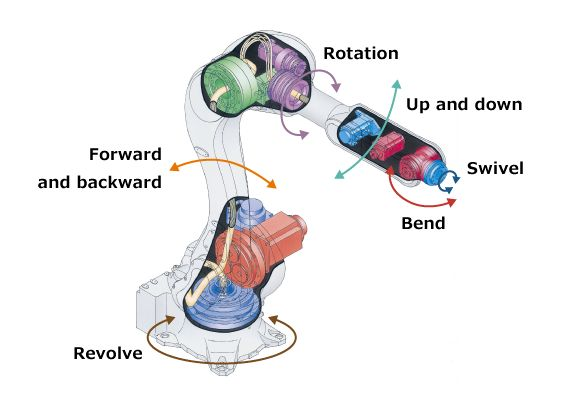
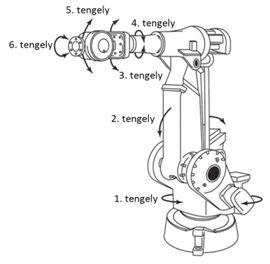
- Szabadságfok (Degrees of Freedom – DoF): Azoknak a független paramétereknek a száma, amelyek egy mechanikai rendszer konfigurációját meghatározzák. A robotikában ez a robot vagy végmegfogója által megvalósítható független mozgási irányok számát jelenti. Egy robotkar esetében ez általában a tengelyek vagy csuklók számának felel meg, ami meghatározza képességét a munkaterén belüli különböző pozíciók és orientációk elérésére.
- Hasznos teher (Payload): Az a maximális tömeg vagy súly, amelyet egy robot, különösen egy ipari manipulátor (bocsánat néhány szó magyarázata lentebb következik), a végmegfogójánál képes szállítani vagy kezelni, miközben megőrzi a meghatározott működési jellemzőit, mint például a sebességet és a pontosságot. Ez egy kritikus teljesítményspecifikáció az ipari alkalmazásokban.

- Ember-robot interakció (Human-Robot Interaction – HRI): Egy multidiszciplináris tudományterület, amely az emberek által vagy emberekkel együtt használt robotrendszerek megértésével, tervezésével és értékelésével foglalkozik. A HRI minden interakciós formát lefed, beleértve a távirányítást (teleoperáció), a közeli együttműködést és a szociális interakciókat, olyan területekre támaszkodva, mint a pszichológia, a tervezés, a mesterséges intelligencia és a robotika.
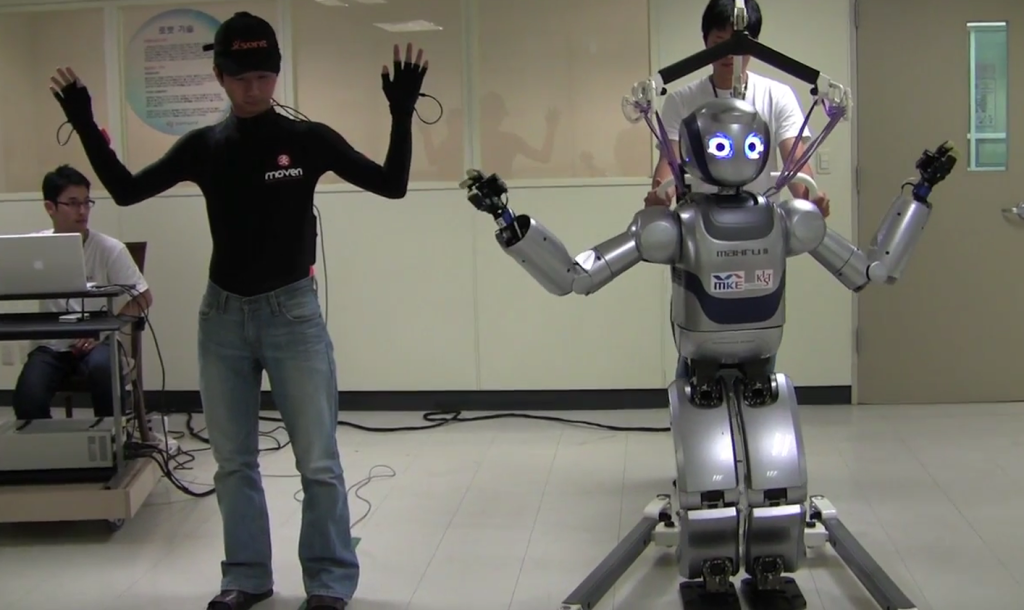
- Távvezérlés (Teleoperation): Egy robot távoli irányítása egy emberi operátor által. Egy távvezérlési rendszerben az operátor távoli helyről küld parancsokat, és visszajelzést kap a robottól, például videó streamet vagy szenzoradatokat, hogy valós időben irányítsa annak cselekvéseit. Ez a megközelítés kulcsfontosságú olyan feladatoknál, amelyek veszélyes, megközelíthetetlen vagy a teljes autonómiához túl összetett környezetben zajlanak.
Robotok osztályozása és típusai
A robotok világa rendkívül sokszínű. Ahhoz, hogy átlássuk ezt a komplex ökoszisztémát, elengedhetetlen a robotok rendszerezése. A kategorizálás segít megérteni, hogy egy adott robotot milyen célra terveztek, milyen környezetben működik, és hogyan viszonyul az emberhez. Az osztályozás egyfajta evolúciós utat is kirajzol: a kezdeti, elkerített, repetitív feladatokat végző ipari robotoktól eljutottunk a rugalmas, intelligens és mobilis rendszerekig.
Ez az evolúció két fő irány mentén zajlott. Az egyik a mobilitás és az autonómia fejlődése: az egyszerű, vonalat követő AGV-k (Automated Guided Vehicle) a gyár padlóján kiterjesztették az automatizálást, de még mindig „buta” gépek maradtak. A valódi áttörést az AMR-ek (Autonomous Mobile Robot) hozták el, amelyek már képesek önállóan tájékozódni és döntéseket hozni, ezzel az automatizálásról az autonómiára helyezve a hangsúlyt. A másik fejlődési irány az emberrel való interakció megváltozása. A kezdeti elszigeteltség helyett megjelentek a kobotok (collaborative robots) , amelyeket már nem az ember helyettesítésére, hanem a vele való biztonságos együttműködésre terveztek.
A robotok fizikai felépítése – csuklós, SCARA, delta stb. – szintén nem önkényes, hanem a klasszikus „form follows function” (a forma a funkciót követi) elv tökéletes példája. Egy hegesztési feladathoz, ahol akadályokat kell megkerülni, a legideálisabb egy emberi karhoz hasonló, többcsuklós csuklós robotkar. Ezzel szemben apró, könnyű tárgyak villámgyors mozgatásához egy delta robot a leghatékonyabb, mivel párhuzamos karos szerkezete minimalizálja a tehetetlenséget. Ez a szekció bemutatja a robotok legfontosabb típusait ezen szempontok szerint.
Ipari és Szolgáltató Robotok (Industrial and Service Robots)
A robotokat a felhasználási területük alapján két nagy kategóriába sorolhatjuk. Ez a legalapvetőbb megkülönböztetés, amely a robot működési környezetét és célját határozza meg.
- Ipari robot (Industrial Robot): Automatikusan vezérelt, újraprogramozható, többcélú manipulátor, amely három vagy több tengelyen programozható, és lehet rögzített vagy mobil, ipari automatizálási alkalmazásokhoz. Az ipari robotokat általában strukturált, ellenőrzött környezetekben, például gyárakban telepítik unalmas, piszkos vagy veszélyes feladatok elvégzésére, mint a hegesztés, festés, összeszerelés és anyagmozgatás, nagy pontossággal és kitartással.
- Szolgáltató robot (Service Robot): Olyan robot, amely hasznos feladatokat végez emberek vagy berendezések számára, kivéve az ipari automatizálási alkalmazásokat. A szolgáltató robotokat felhasználási esetük szerint személyes/háztartási robotokra (pl. robotporszívók, fűnyírók) és professzionális szolgáltató robotokra (pl. logisztikai, orvosi asszisztencia, vendéglátás vagy ellenőrzési rendszerek) kategorizálják. Úgy tervezték őket, hogy nyilvános vagy emberek által lakott, gyakran strukturálatlan és dinamikus környezetben működjenek.
Felépítés szerint (Mechanical Structure)
A robotok mechanikai felépítése, vagyis kinematikai lánca határozza meg a mozgási képességeiket, a munkaterük formáját és méretét, valamint a sebességüket és teherbírásukat. Az alábbiak a legelterjedtebb ipari robot-architektúrák.
- Csuklós Robotkar (Articulated Robot): Olyan robot, amelynek karja több forgócsuklóval rendelkezik, jellemzően hattal, ami az emberi karhoz teszi hasonlóvá. Ez a kialakítás nagy rugalmasságot és egy nagy, összetett munkateret biztosít, lehetővé téve, hogy akadályok körül is mozogjon. A csuklós robotok a leggyakoribb ipari robot típusok, amelyeket széles körben alkalmaznak, többek között hegesztésre, festésre, összeszerelésre, anyagmozgatásra és gépkiszolgálásra.

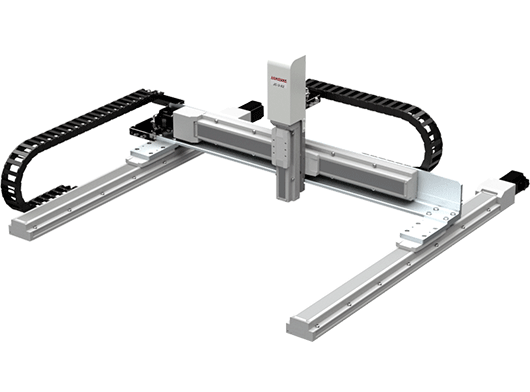
- Derékszögű/Portál Robot (Cartesian/Gantry Robot): Olyan robot, amely három, egymásra merőleges lineáris tengelyen (X, Y és Z) működik, amelyek egy derékszögű koordináta-rendszert határoznak meg. Lineáris vagy portálrobotoknak is nevezik őket, merev szerkezetük, nagy pontosságuk és képességük jellemzi őket nehéz terhek kezelésére egy nagy, doboz alakú munkatérben. Gyakran használják őket pick-and-place feladatokra, CNC megmunkálásra és 3D nyomtatásra.
- SCARA Robot (SCARA Robot): A Selective Compliance Assembly Robot Arm (Szelektíven Engedékeny Összeszerelő Robotkar) rövidítése. Ez a robot az X-Y síkban engedékeny (rugalmas), de a Z-tengely mentén merev. Ez az egyedi tulajdonság rendkívül gyorssá és pontossá teszi olyan feladatokhoz, mint a pick-and-place, összeszerelés és csomagolás, ahol a legtöbb mozgás vízszintes, egy végső függőleges beillesztéssel.

- Delta/Párhuzamos Robot (Delta/Parallel Robot): Pók-szerű megjelenésű robot, amely három vagy négy, egyetlen alap platformhoz csatlakozó karból áll. A mozgató motorok az alapban helyezkednek el, ami a karokat nagyon könnyűvé teszi és rendkívül nagy sebességű mozgásokat tesz lehetővé. A delta robotokat elsősorban kis, könnyű tárgyak gyors pick-and-place és csomagolási feladataira használják, ami gyakori az élelmiszer-, gyógyszer- és elektronikai iparban.

- Hengeres Robot (Cylindrical Robot): Olyan robot, amelynek konfigurációja legalább egy forgócsuklót tartalmaz az alapnál és legalább egy prizmatikus (lineáris) csuklót a tagok összekötésére. Mozgásai egy hengeres munkateret határoznak meg. Ezeket a robotokat olyan feladatokra használják, mint az összeszerelés, gépkiszolgálás és ponthegesztés, bár ma már kevésbé elterjedtek, mint a csuklós vagy SCARA robotok.

Mobilitás szerint (Mobility)
A robotok egyre nagyobb hányada képes helyváltoztatásra. A mobilitás módja alapvetően meghatározza, hogy a robot milyen terepen és milyen hatékonysággal tud mozogni.
- Mobil Robot (Mobile Robot): Önjáró és önellátó robot, amely képes mechanikusan nem korlátozott pályán mozogni. Ez egy tág kategória, amely magában foglal minden olyan robotot, amely nincs egyetlen helyhez rögzítve, beleértve a kerekes, lábakkal mozgó és légi robotokat.
- Kerekes Robot (Wheeled Robot): Olyan mobil robot, amely kerekeket használ a helyváltoztatáshoz. Ez a leggyakoribb és legenergiahatékonyabb mobilitási forma sík vagy viszonylag sima felületeken működő robotok számára, mint például raktárak, kórházak vagy otthonok padlói.
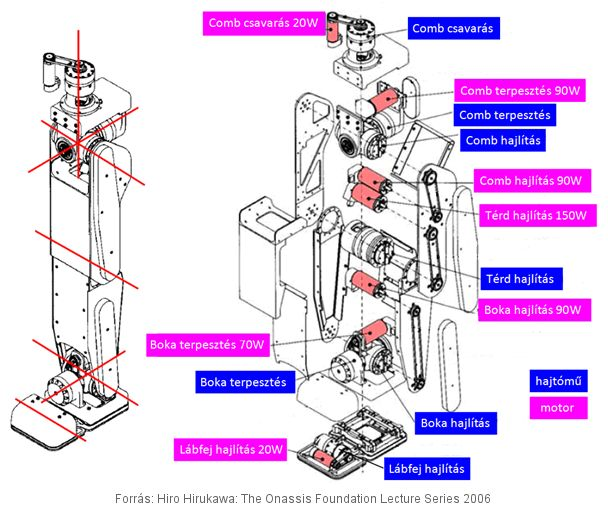
- Lábakkal Mozgó Robot (Legged Robot): Olyan robot, amely csuklós végtagokat, azaz lábakat használ a helyváltoztatáshoz. A lábakkal mozgó robotok, mint például a kétlábúak vagy négylábúak, kiváló mobilitást nyújthatnak egyenetlen, durva vagy összetett terepen, ahol a kerekek kudarcot vallanának, utánozva az állatok mozgását.
- Négylábú Robot (Quadruped): Négylábú robot, amelyet gyakran az állatok mozgása ihletett, dinamikus stabilitásáról és képességéről ismert, hogy kihívást jelentő és strukturálatlan környezetben is közlekedjen. Ezek a robotok képesek járni, futni és átmászni olyan akadályokon, amelyek a kerekes járművek számára megközelíthetetlenek.
Természetesen léteznek a fentieknek kombinációi is, például kettő vagy négy lábú kerekes robotok, melyek elég jól ötvözik a két világ képességeit, csak kicsit drágábbak.

Természetesen vannak 5, 6 és akárhány lábú kerekű és mindenféle egzotikus felépítésú robotok is, de mindet felsorolva sose érnénk az oldal végére.
- Automatizált Vezérelt Jármű (Automated Guided Vehicle – AGV): Olyan mobil robot, amely előre meghatározott útvonalakat követ, amelyeket a padlóba vagy a padlóra ágyazott vezetékek, mágnescsíkok vagy optikai vonalak jelölnek. Az AGV-ket anyagmozgatásra használják strukturált környezetekben, mint például raktárakban és gyárakban. Képesek észlelni az útjukba kerülő akadályokat, de általában meg kell állniuk és várniuk kell azok eltávolítására, mivel nem tudnak önállóan navigálni körülöttük.
- Autonóm Mobil Robot (Autonomous Mobile Robot – AMR): Fejlett mobil robot, amely szenzorokat (például LiDAR-t és kamerákat) és kifinomult szoftvereket (mint a SLAM algoritmusok) használ a környezetének feltérképezésére és dinamikus navigálásra előre meghatározott útvonalak nélkül. Az AGV-vel ellentétben az AMR képes önállóan megtervezni a leghatékonyabb útvonalat és biztonságosan manőverezni a váratlan akadályok körül, ami rendkívül rugalmassá teszi dinamikus környezetekben. Az önvezető autók is ebbe a kategóriába sorolhatók, hibrid működéssel.
- Drón / Pilóta Nélküli Légijármű (Drone / Unmanned Aerial Vehicle – UAV): Emberi pilóta nélküli légi jármű. A drónokat vagy a fedélzeti számítógépek vezérlik autonóm módon, vagy egy földi operátor távolról. Széles körben alkalmazzák őket, többek között légifotózásra, ellenőrzésre, megfigyelésre és szállításra. Az Aerobot egy kapcsolódó kifejezés egy önálló repülésre képes robotra, gyakran földönkívüli légkörben.
Interakció és megjelenés szerint (Interaction and Appearance)
A robotok nemcsak funkciójukban, hanem az emberhez való viszonyukban és fizikai megjelenésükben is különböznek. Ezek a típusok gyakran a szolgáltató robotok kategóriájába esnek, ahol a közvetlen interakció és az elfogadhatóság kulcsfontosságú.
- Kollaboratív Robot / Kobot (Collaborative Robot / Cobot): Kifejezetten a közvetlen ember-robot interakcióra tervezett robot egy megosztott munkaterületen belül, ami szükségtelenné teszi a hagyományos biztonsági kerítéseket. A kobotok fejlett biztonsági funkciókkal vannak felszerelve, mint például erő- és nyomatékszenzorok, lekerekített élek és sebességfigyelés, hogy biztonságosan dolgozhassanak az emberi operátorok mellett olyan feladatokon, mint az összeszerelés, ellenőrzés és gépkiszolgálás.
- Humanoid Robot (Humanoid): Olyan robot, amelynek testalkata az emberi testet utánozza, általában törzzsel, fejjel, két karral és két lábbal rendelkezik. A humanoid forma előnyös az emberközpontú környezetben való működéshez, emberi eszközök használatához és az emberekkel való természetesebb interakció megkönnyítéséhez.
- Android (Android): Olyan humanoid robot, amelyet úgy terveztek, hogy a lehető legjobban hasonlítson egy emberre és úgy is viselkedjen, gyakran szintetikus, hússzerű bőrrel. A kifejezés technikailag egy férfias megjelenésű robotra utal (a görög andr- tőből, ami férfit jelent), míg a Gynoid egy női emberre hasonlító robot megnevezése.

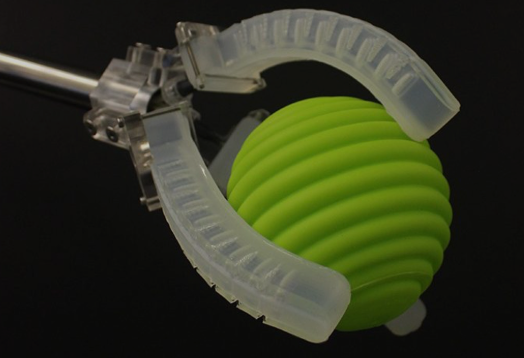
- Soft (Puha?) Robot (Soft Robot): Nagymértékben hajlékony és rugalmas anyagokból, például elasztomerekből, gélekből vagy folyadékokból készült robot, merev tagok helyett. A biológiai organizmusok, mint például a polipok által ihletett soft robotok képesek hajolni, nyúlni és deformálódni. Ez a veleszületett rugalmasság biztonságosabbá teszi őket az emberi interakció során, ellenállóbbá a sérülésekkel szemben, és rendkívül alkalmazkodóvá olyan feladatokhoz, mint a finom vagy szabálytalan alakú tárgyak megfogása.
A robotok anatómája: hardver komponensek
Egy robot működése a hardveres komponenseinek összehangolt munkáján alapul. Ezek az alkatrészek alkotják a robot fizikai testét, és teszik lehetővé, hogy érzékelje a környezetét, mozogjon és feladatokat hajtson végre. A robot anatómiája egy biológiai organizmushoz hasonlítható: a vezérlő az agy, amely a döntéseket hozza; az aktuátorok és motorok az izmok, amelyek a mozgást generálják; a szenzorok az érzékszervek, amelyek információt gyűjtenek a világról; a manipulátor és a végmegfogó pedig a kar és a kéz, amelyekkel a robot interakcióba lép a környezetével.
Ez a rendszer egy zárt visszacsatolási körként (closed-loop system) működik. A folyamat a vezérlővel kezdődik, amely kiad egy parancsot, például „menj előre”. Ezt a parancsot az aktuátorok hajtják végre, amelyek megforgatják a kerekeket. Miközben a robot mozog, a szenzorai – például egy LiDAR – érzékelik a környezetet, és észlelnek egy akadályt. Az érzékelt adat visszajut a vezérlőhöz, amely feldolgozza az új információt, és módosítja a parancsot: „állj meg” vagy „kerüld ki”. Ez a folyamatos percepció-kogníció-akció ciklus teszi lehetővé a robot intelligens és adaptív viselkedését. Ezen belül a végmegfogó (end-effector) kiválasztása kritikus, mert ez határozza meg, hogy a robot milyen konkrét feladatot képes elvégezni. Egy robotkar önmagában csak egy mozgó platform; egy hegesztőpisztollyal hegesztőrobottá, egy megfogóval anyagmozgatóvá, egy kamerával pedig ellenőrző rendszerré válik.
Vezérlés és mozgatás (Control and Actuation)
Ezek a komponensek felelősek a robot mozgásának irányításáért és fizikai megvalósításáért.
- Vezérlő (Controller): A robot „agya”. Ez egy számítógép-alapú rendszer, amely tartalmazza a robot programjának végrehajtásáért felelős hardvert és szoftvert. A vezérlő értelmezi az utasításokat, feldolgozza a szenzorokból származó adatokat, kiszámítja a szükséges mozgásokat, és jeleket küld az aktuátoroknak a robot cselekvéseinek, sebességének és pozíciójának vezérlésére.
- Aktuátor (Actuator): Egy gép olyan alkatrésze, amely egy mechanizmus vagy rendszer mozgatásáért és vezérléséért felelős. A robotikában az aktuátorok az „izmok”, amelyek a tárolt energiát (jellemzően elektromos, hidraulikus vagy pneumatikus) fizikai mozgássá alakítják. A vezérlőtől kapnak vezérlőjeleket, és meghajtják a robot csuklóit és tagjait.
- Motor (Motor): A robotikában a forgó vagy lineáris mozgás létrehozására használt leggyakoribb elektromos aktuátor típus.
- DC Motor: Egyszerű és széles körben használt motor, amely folyamatos forgást biztosít. Gyakran használják mobil robotok kerekeinek meghajtására nagy sebességük és könnyű vezérelhetőségük miatt.
- Szervomotor (Servo Motor): Forgó vagy lineáris aktuátor, amely lehetővé teszi a szög- vagy lineáris pozíció, sebesség és gyorsulás precíz vezérlését. Egy motorból és egy pozíció-visszacsatolásra szolgáló szenzorból (enkóder) áll, zárt hurkú vezérlőrendszert alkotva. A szervók elengedhetetlenek a robotcsuklók precíz mozgásához.
- Léptetőmotor (Stepper Motor): Olyan elektromos motor, amely egy teljes fordulatot egyenlő lépésekre oszt. A motor pozíciója parancsolható, hogy ezen lépések egyikénél mozogjon és tartson pozíciót visszacsatoló szenzor nélkül (nyílt hurkú vezérlés), ami ideálissá teszi precíziós pozicionálási alkalmazásokhoz, mint például a 3D nyomtatók.
- Hidraulika (Hydraulics): Olyan működtető rendszer, amely nyomás alatt lévő folyadékot, általában olajat használ mechanikai erő és mozgás létrehozására. A hidraulikus rendszerek nagyon nagy erőket képesek kifejteni, és nagy, erős ipari robotokban használják őket nehéz emelési és nagy erőt igénylő alkalmazásokhoz.
- Pneumatika (Pneumatics): Olyan működtető rendszer, amely sűrített gázt, általában levegőt használ a mozgás létrehozására. A pneumatikus rendszerek nagy sebességükről, alacsony költségükről és tisztaságukról ismertek, ami alkalmassá teszi őket végmegfogókhoz (mint pl. robotkezek) és kisebb, gyors mozgásokat igénylő robotikai alkalmazásokhoz.
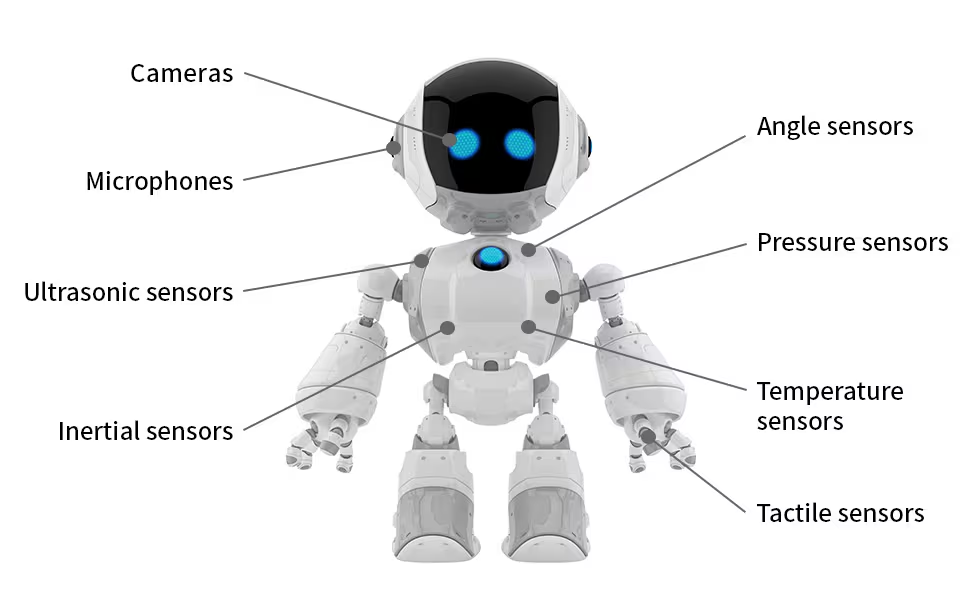
Érzékelés és percepció (Sensing and Perception)
A szenzorok a robot érzékszervei, amelyek lehetővé teszik, hogy adatokat gyűjtsön a saját állapotáról és a környezetéről, ami az autonóm működés alapfeltétele.
- Szenzor (Sensor): Olyan eszköz, amely érzékeli a fizikai környezetből származó valamilyen bejövő információt. A specifikus bemenet lehet fény, hő, mozgás, nedvesség, nyomás vagy bármely más környezeti jelenség. A szenzorok adatokat szolgáltatnak a robotnak a világról, lehetővé téve számára, hogy érzékelje környezetét és ennek megfelelően alakítsa viselkedését.
- LiDAR (Light Detection and Ranging): Távérzékelési módszer, amely fényt használ impulzuslézer formájában a Földhöz vagy más tárgyakhoz való távolságok mérésére. A LiDAR szenzor lézerimpulzusokat bocsát ki, és méri a visszavert fény visszatéréséhez szükséges időt. Ezt az adatot a környezet rendkívül pontos 2D vagy 3D digitális ábrázolásainak, úgynevezett pontfelhőknek a létrehozására használják. Kulcsfontosságú technológia az autonóm járművek és mobil robotok navigációjához és akadályelkerüléséhez.
- Inerciális Mérőegység (Inertial Measurement Unit – IMU): Elektronikus eszköz, amely egy test fajlagos erejét, szögsebességét és néha a testet körülvevő mágneses mezőt méri gyorsulásmérők, giroszkópok és néha magnetométerek kombinációjával. Az IMU-k kulcsfontosságúak a robot orientációjának, sebességének és gravitációs erőinek követéséhez, lehetővé téve olyan feladatokat, mint az egyensúlyozás, a navigáció és a mozgás stabilizálása.
- Kamera / Látórendszer (Camera / Vision System): Olyan szenzor, amely vizuális információt rögzít a környezetből, a robot „szemeként” funkcionálva. A látórendszereket, amelyek az egyszerű 2D kameráktól a komplex 3D sztereó vagy mélységérzékelő kamerákig terjedhetnek, számos feladatra használják, beleértve a tárgyfelismerést, vonalkódolvasást, minőségellenőrzést, irányítást és navigációt (pl. vizuális SLAM).
- Erő-/Nyomatékszenzor (Force/Torque Sensor): Olyan szenzor, amely a több tengely mentén kifejtett erőket és nyomatékokat méri. Jellemzően a robot csuklójára szerelve visszajelzést ad, amely lehetővé teszi a precíz vezérlést az érintésérzékeny feladatokban, mint például az összeszerelés, csiszolás, polírozás és sorjázás. Kritikus biztonsági komponens a kollaboratív robotokban is, lehetővé téve számukra az ütközések észlelését.
- Taktilis Szenzor / Robotbőr (Tactile Sensor / Robot Skin): Olyan szenzor, amely a környezetével való fizikai interakcióból származó információt méri. A taktilis szenzorok az érintés biológiai érzékét utánozzák. Amikor ezek a szenzorok a robot testének nagy felületén vannak elosztva, gyakran robotbőrnek nevezik őket. Ez a technológia biztonságosabb ember-robot interakciót és ügyesebb tárgymanipulációt tesz lehetővé.
Interakció a környezettel (Interaction with the Environment)
Ezek a komponensek a robot „végrehajtó” részei, amelyekkel fizikailag hat a világra.
- Manipulátor / Robotkar (Manipulator / Robot Arm): A robot kar-szerű mechanizmusa, amely csuklókkal összekötött tagok sorozatából áll. A manipulátor felelős a végmegfogó mozgatásáért és pozicionálásáért a robot munkaterében egy feladat elvégzése érdekében. A kifejezést gyakran a „robotkar” szinonimájaként használják.
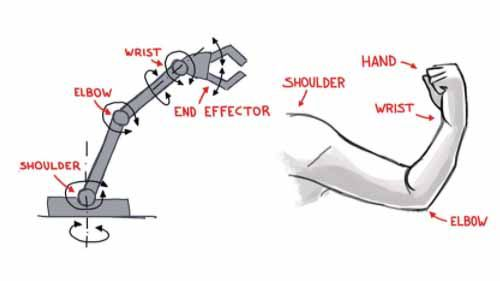
- Végmegfogó / Vég-effektor (End-Effector / End-of-Arm Tooling – EOAT): A robotkar végén található eszköz, amelyet a környezettel való interakcióra terveztek. A végmegfogó a robot „munkaeszköze”, és az alkalmazástól függ. EOAT nélkül egy robotkar csak egy pozicionáló eszköz. A végmegfogó kiválasztása határozza meg a robot funkcióját.

- Megfogó (Gripper): A leggyakoribb végmegfogó típus, amely a robot „kezeként” szolgál tárgyak megragadására, tartására és manipulálására. A megfogók sokféle formában léteznek, beleértve a két- vagy többujjas megfogókat, vákuumos megfogókat (szívással) és mágneses megfogókat.
- Mechanikus megfogók (Mechanical Grippers): Ezek az eszközök ujjak vagy pofák segítségével, mechanikus erővel ragadják meg a tárgyakat. A legegyszerűbb változatok két ujjal rendelkeznek, melyek párhuzamosan vagy egy szögben záródnak. Léteznek azonban komplexebb, több ujjal rendelkező (antropomorf) változatok is, melyek képesek különböző formájú és méretű tárgyakhoz is alkalmazkodni. Működtetésük lehet pneumatikus, elektromos vagy hidraulikus.
- Vákuumos megfogók (Vacuum Grippers): Ezek a megfogók tapadókorongok és vákuum segítségével emelik fel a tárgyakat. A tapadókorongban létrehozott nyomáskülönbség biztosítja a szükséges tartóerőt. Különösen alkalmasak sík, sima felületű, könnyű tárgyak, például üveglapok, papírdobozok vagy elektronikai alkatrészek mozgatására. Előnyük a gyorsaság és a kíméletes anyagmozgatás.
- Mágneses megfogók (Magnetic Grippers): Mágneses tér segítségével rögzítik és mozgatják a ferromágneses (vasat tartalmazó) anyagokat. Lehetnek állandó mágnesek vagy elektromágnesek, melyeknél a mágneses erő szabályozható. Gyakran alkalmazzák őket az autóiparban és a fémfeldolgozásban nehéz acéllemezek vagy alkatrészek emelésére. Megbízhatóak és minimális karbantartást igényelnek.
Vég-effektorok lehetnek természetesen más szerszámok is, például hegesztőpisztolyok, festékszórók, vágó- és más megmunkálóeszközök is.
A robotok „elméje”: szoftveres elemek és intelligencia
A robot fizikai teste csupán egy eszköz; a valódi képességeit és viselkedését a szoftver, az algoritmusok és az intelligencia határozzák meg. Ez a szekció a robotok „elméjével” foglalkozik: azokkal a nem fizikai komponensekkel, amelyek a tanulást, a döntéshozatalt, a navigációt és a fejlesztést lehetővé teszik. Itt válnak el egymástól a modern, intelligens robotok és a múlt egyszerű automatái.
A fejlődés egyik legfontosabb mérföldköve a szimuláció (simulation) és a digitális ikertestvér (digital twin) koncepcióinak megjelenése. Bár a két fogalmat gyakran szinonimaként használják, valójában a robotikai életciklus két különböző, de egymásra épülő fázisát képviselik. A fejlesztés előtti, tervezési fázisban a mérnökök szimulációs szoftvereket használnak, hogy egy tisztán virtuális térben teszteljék a robot mozgását, elkerüljék az ütközéseket és optimalizálják a ciklusidőt, még mielőtt egyetlen csavart is megvásárolnának. Újabban az AI robotok neurális hálóit egy szimulált világban tanítják is, felgyorsítva és egyszerűsítve a felprogramozást is. Ezzel csökkentik a kezdeti kockázatot és költségeket. A fizikai robot telepítése után jön létre a digitális ikertestvér, amely már nemcsak egy szimuláció, hanem a valós robot élő, szenzoradatokkal folyamatosan frissített virtuális mása. Ha a fizikai robot motorja melegszik, a digitális iker modelljében ez az adat azonnal megjelenik, lehetővé téve a prediktív karbantartást és a valós idejű optimalizálást. A szimuláció tehát a tervezési, míg a digitális iker az üzemeltetési kockázatot és költséget csökkenti.
Intelligencia és tanulás (Intelligence and Learning)
Ezek a koncepciók teszik lehetővé, hogy a robotok ne csak előre programozott utasításokat kövessenek, hanem tanuljanak a tapasztalataikból és alkalmazkodjanak a változó körülményekhez. Csak a leglényegesebbek, részletesebben az aiszakerto.hu blogon.
- Mesterséges Intelligencia (Artificial Intelligence – AI): A számítástechnika széles és interdiszciplináris ága, amely olyan okos gépek építésével foglalkozik, amelyek képesek az emberi intelligenciát igénylő feladatok elvégzésére. Ide tartozik a problémamegoldás, a tanulás, az érvelés, az észlelés és a nyelv megértése. A robotikában az MI lehetővé teszi az autonómiát és az intelligens döntéshozatalt.
- Gépi Tanulás (Machine Learning – ML): A mesterséges intelligencia egy részterülete, amely adatok és algoritmusok használatára összpontosít az emberi tanulás utánzására, fokozatosan javítva a pontosságát. Az ML algoritmusok egy modellt építenek mintadatok, úgynevezett „tanító adatok” alapján, hogy előrejelzéseket vagy döntéseket hozzanak anélkül, hogy kifejezetten erre programozták volna őket. Ez a kulcstechnológia, amely lehetővé teszi a robotok számára, hogy a tapasztalatokból tanuljanak.
- Fizikai MI (Physical AI / Embodied AI): A mesterséges intelligencia integrálása fizikai rendszerekkel, például robotokkal, amelyek képesek érzékelni, érvelni, cselekedni és tanulni a valós világban. A tisztán digitális MI-vel ellentétben a Fizikai MI az észlelés, a döntéshozatal és a fizikai cselekvés folyamatos visszacsatolási körén keresztül működik, lehetővé téve a gépek számára, hogy kölcsönhatásba lépjenek a dinamikus, strukturálatlan környezetekkel és alkalmazkodjanak azokhoz. Az MI, a robotika és a szenzortechnológia konvergenciáját képviseli.
- Kognitív/Okos Robot (Cognitive/Smart Robot): Olyan intelligens robot, amely képes érzékelni a környezetét, tanulni a tapasztalatokból, és viselkedését a szenzoradatok alapján, közvetlen emberi beavatkozás nélkül módosítani. A kifejezés a robot kognitív funkcióinak, mint az érvelés, tervezés és tanulás képességét hangsúlyozza, ami a robotika és az MI mély fúzióját jelenti.
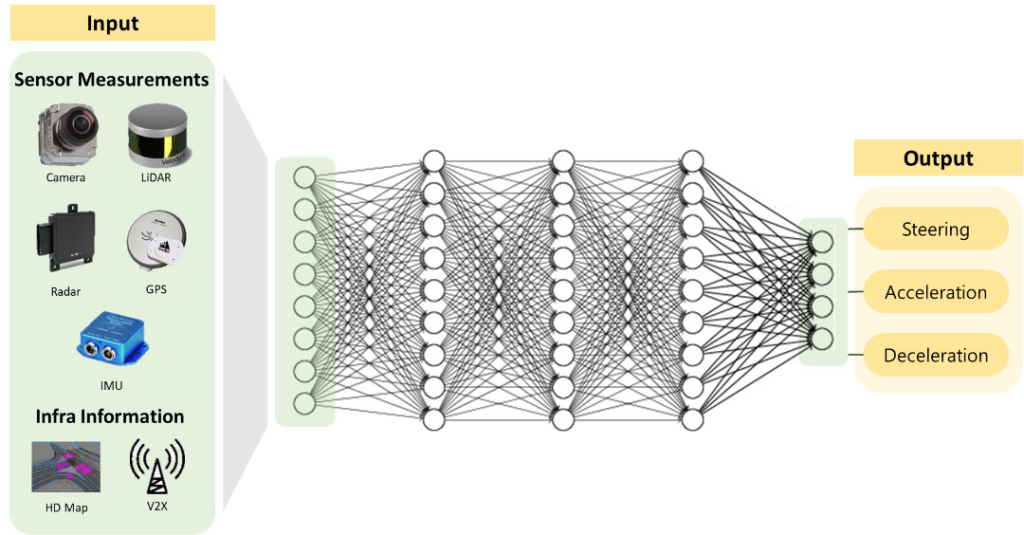
- Végponttól-végpontig tartó neurális háló (End-to-end neural network) (E2E): Olyan mesterséges intelligencia modell, amely a teljes feladatot egyetlen, integrált rendszerként kezeli. Ahelyett, hogy a problémát több különálló, egymást követő lépésre bontanánk (pl. adat-előfeldolgozás, jellemzőkinyerés, osztályozás), az end-to-end modell a nyers bemeneti adatokat (pl. egy képet) kapja meg, és közvetlenül a végső kimenetet (pl. a képen látható tárgy megnevezését vagy megfogásához szükséges koordináták) adja vissza
Navigáció és virtuális modellezés
Ezek a technológiák teszik lehetővé, hogy a robotok tájékozódjanak a térben, és hogy a fejlesztők virtuális környezetben tesztelhessék és optimalizálhassák őket.
- SLAM (Simultaneous Localization and Mapping): Számítási módszer, amelyet robotok és autonóm járművek használnak egy ismeretlen környezet térképének felépítésére, miközben egyidejűleg nyomon követik saját helyzetüket a térképen belül. A SLAM algoritmusok szenzorokból, például LiDAR-ból vagy kamerákból származó adatokat dolgoznak fel a térkép létrehozásához és az önlokalizációhoz. Ez a kulcstechnológia, amely lehetővé teszi a mobil robotok valódi autonómiáját ismeretlen területeken.
- Gépi Látás (Computer Vision): A mesterséges intelligencia egy területe, amely lehetővé teszi a számítógépek és rendszerek számára, hogy értelmes információkat nyerjenek ki digitális képekből, videókból és más vizuális bemenetekből – és ezen információk alapján cselekedjenek vagy javaslatokat tegyenek. A robotikában a gépi látás lehetővé teszi a robotok számára, hogy „lássák” és értelmezzék környezetüket olyan feladatokhoz, mint a navigáció, tárgyfelismerés, minőségellenőrzés és manipuláció.
- Szimuláció (Simulation): Egy fizikai robot és környezetének virtuális modelljének létrehozása és futtatása speciális szoftver segítségével. A robotikai szimuláció lehetővé teszi a mérnökök számára, hogy digitális térben tervezzenek, teszteljenek, programozzanak és optimalizáljanak robotrendszereket és munkaállomásokat, mielőtt a fizikai hardvert megépítenék vagy telepítenék. Ez időt takarít meg, csökkenti a költségeket, javítja a biztonságot, és lehetővé teszi a robotpályák és a logika alapos validálását.
- Világszimuláció (World Simulation): A világszimuláció egy olyan számítógépes modell, amely egy komplex környezet vagy „világ” működését, szabályait és interakcióit utánozza. A mesterséges intelligencia kontextusában ez egy virtuális tanulási környezetet jelent, ahol az AI ágensek (pl. egy önvezető autó szoftvere vagy egy robot) biztonságosan, gyorsan és nagy mennyiségű tapasztalatot szerezve tanulhatnak. A szimuláció a valós világ fizikáját, objektumait és eseményeit (pl. időjárás, forgalom, emberek mozgása) modellezi. Az AI ebben a virtuális térben próbálgatja a cselekvéseit, és a következményekből (jutalmakból és büntetésekből) tanul anélkül, hogy a valóságban kárt okozna vagy drága erőforrásokat használna. Ez a megközelítés kulcsfontosságú például az önvezető technológiák és a komplex robotikai feladatok fejlesztésénél, mivel lehetővé teszi a ritka vagy veszélyes helyzetek hatékony tesztelését.
- Digitális Ikertestvér (Digital Twin): Egy fizikai tárgy, folyamat vagy rendszer virtuális reprezentációja, amely valós idejű digitális megfelelőjeként szolgál. A statikus szimulációval ellentétben a digitális ikertestvért folyamatosan frissítik a fizikai eszközön lévő szenzorokból származó adatokkal, élő hidat teremtve a fizikai és a virtuális világ között. A robotikában valós idejű monitorozásra, teljesítményelemzésre, prediktív karbantartásra és a működés optimalizálására használják a robot teljes életciklusa során.
- GPU (Graphics Processing Unit): Speciális elektronikus áramkör, amelyet a memória gyors manipulálására és megváltoztatására terveztek, hogy felgyorsítsák a képek létrehozását egy képkufferben, amelyet egy megjelenítő eszközre szánnak. A modern MI-ben és robotikában a GPU-kat széles körben használják általános célú számítástechnikára (GPGPU), mert rendkívül párhuzamos architektúrájuk rendkívül hatékonnyá teszi őket a mélytanulási modellek betanításához és a hatalmas mennyiségű szenzoradat valós idejű elemzéséhez szükséges nagy, párhuzamosítható számítások feldolgozásában.
Konkrétan AI
Hogyan működik a robotok AI-val történő irányítása? (részletes cikkem itt)
- A VLM (Vision-Language Model) elsősorban a környezet észlelésére és értelmezésére fókuszál: feldolgozza a vizuális inputot (pl. kameraképek) és a nyelvi utasításokat (pl. „Válogasd szét a gyümölcsöket szín szerint!”), majd logikus terveket készít. Ez a „gondolkodás” szakasza, ahol a modell megérti a világot, de nem közvetlenül irányít mozgásokat.
- A VLA(Vision-Language-Action) erre épít: integrálja a VLM képességeit, de hozzáadja a fizikai cselekvés generálását, például motorparancsokat a robotnak (pl. „Emeld fel a karod, és tedd a banánt a sárga tányérba!”). Így a VLA nem feltétlenül külön modell, hanem gyakran egy bővített VLM, ami hidat képez a gondolkodás és a cselekvés között – de pl. a Google Robotics 1.5 rendszerében ezek tandemben együtt dolgoznak.
Zárásul
Ez az átfogó szószedet a robotika világának legfontosabb fogalmait gyűjtötte össze, a mechanikai alapoktól a szoftveres intelligenciáig. A definíciók és kategóriák bemutatása során kirajzolódott, hogy a modern robotika lényege a hardver (a test) és a szoftver (az elme) zökkenőmentes integrációja. Egy robot nem csupán alkatrészek összessége, hanem egy komplex, visszacsatolásokon alapuló rendszer, ahol az érzékelés, a döntéshozatal és a cselekvés elválaszthatatlan egységet alkot.
A tárgyalt fogalmakból több kulcsfontosságú trend is levezethető, amelyek napjainkban és a jövőben is meghatározzák a terület fejlődését:
- Az autonómia felé való elmozdulás: Az egyszerű, előre programozott AGV-ktől a dinamikusan navigáló AMR-ekig tartó út, amelyet a SLAM technológia tett lehetővé, egyértelműen jelzi az igényt a rugalmasabb, intelligensebb és kevesebb emberi felügyeletet igénylő rendszerek iránt.
- Az emberközpontú együttműködés: A kobotok megjelenése paradigmaváltást hozott az ipari automatizálásban. A cél már nem csupán az emberi munka kiváltása, hanem a humán képességek kiegészítése, ami biztonságosabb és hatékonyabb munkakörnyezetet teremt.
- A mesterséges intelligencia mindent átható szerepe: A Fizikai MI koncepciója rávilágít, hogy a jövő robotjai nemcsak mechanikusan fejlettek, hanem kognitív képességekkel is rendelkeznek. A gépi tanulás, a gépi látás és a fejlett szenzorok teszik lehetővé, hogy a robotok alkalmazkodjanak a valós világ kiszámíthatatlanságához.
- A virtuális és a fizikai világ összefonódása: A szimuláció és a digitális ikertestvér technológiák forradalmasítják a robotok tervezését, telepítését és üzemeltetését. A virtuális tesztelés és a valós idejű monitorozás csökkenti a költségeket, növeli a hatékonyságot és minimalizálja a kockázatokat.
Reméljük, hogy ez a szószedet hasznos alapként szolgál mindenki számára, aki mélyebben szeretné megérteni a robotika izgalmas és gyorsan fejlődő világát. Használja ezt a tudásbázist kiindulópontként a további felfedezésekhez, és térjen vissza hozzá, ahogy újabb és újabb kérdések merülnek fel Önben.